
Part 9: Working With Distance Sensor
In this exercise we will find out how far an object is from our robot.
Add Code for Distance Sensor
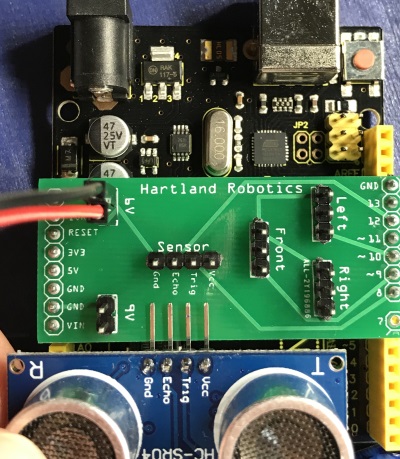
- Observe the pins on the distance sensor. Note the pins labeled Trig and Echo
- In the wallfinder tab, create a variable to hold the trigger pin location. Set this to 8
- Declare a variable to hold the echoPin location. Set this to 12.
- In the wallfinder setup method, set the pin mode for the trigger and echo pins
- Add a distance function that looks like the one below
Wiring the Distance Sensor
- Connect the echo pin on the distance sensor to the echo pin on the circuit board
- Connect the trigger pin on the distance sensor to the pin labeled trig on the circuit board
- Connect the Ground pin on the distance sensor to the GND pin on the sensor pins on the circuit board
- Connect the VCC (power) pin on the distance sensor to the VCC pin on the sensor pins on the circuit board.
Testing
Update you loop method to:
- Call the distance method
- wait 1 second
This time when you run your code select Tools -> Serial Monitor from the menu. This will allow you to see the print statements in the distance function